Wheels also move and eyes light up - still need to solder the wires so it can work when the body is mounted on top. The wheels' movement is dependent on signal from the range-sensor. It's still kinda iffy.
The nose has a home-made capacitive sensor, made with a high resistor to accumulate and respond to current (the real capacitive sensor i got from the Prof. Galanter was too big, bulky to be able to fit it easily inside the robot's head. The robot doesn't like it's nose being touched. hides away when nose is touched.
Head bobs and eyes blink if the ears are rubbed (FSR's inside the ears).
The object is a small mechanical flying insect called 'Bug'. The bug follows any motion detected in the dark. It either goes around following the motion quietly or, if a certain pressure sensor hasn't been pressed, bug follows the motion while sounding off an alarm. So it can serve as an intruder detector or, in the motion is not caused by an intruder, the insect simply follows the person moving about, casting light on them, knocking into them and hence, 'bugging' them.. =)
It has three sensors:
Light sensor
A direction sensing motion detector
Pressure sensor
And two motors are:
DC motor
Servo
Model:
The bug has a set of propellers at the front, which are controlled by the DC motor. And it has a flap at the back which can swing 180 degrees using the servo, to allow the insect to turn while in flight.
The insect becomes active only in the dark. As soon as the insect detects any motion in the dark, it starts flying towards it while sounding off a low alarm. The alarm sound can be turned off by pressing onto a hidden pressure sensor on the bug or else it would keep increasing in intensity with each passing minute.
Mechanism:
The bug remains inactive until the light sensor detects there isn't enough light in the room / surroundings. It's green LED lights turn up to indicate that it is 'awake' and detecting motion around it.
As soon as the motion detector detects any motion, the bug starts flight. The DC motor turns on to lift the insect off the ground and the direction sensing motion detector can relay which direction the tail-flap should turn. At the same time the alarm sounds off as well.
When someone pushes onto the pressure sensor, the alarm sounds off but, the bug continues flying and following the motion direction. If the motion sensors stop receiving input for over 30 seconds, the bug circles around it's surroundings for another 30 seconds. If no further motion is detected and the alarm is off, the bug slowly settles down and returns to its initial 'awake' position, waiting for another input from the motion sensors.
Concept Design:
The initial concept design I had in mind for this project was something I had made with just .. junk .. from around my apartment some time ago. Here's what that rather not-so-good-looking bug looked like:
So, the idea for this project is mainly a flying bug - that looks somewhat like the dragonfly above. Possibly, even made to be not-so-pretty-looking 'on purpose' (to make it look like it was actually made out of junk found lying around). Just add a propeller on the front, and a servo with a flap at the back :)
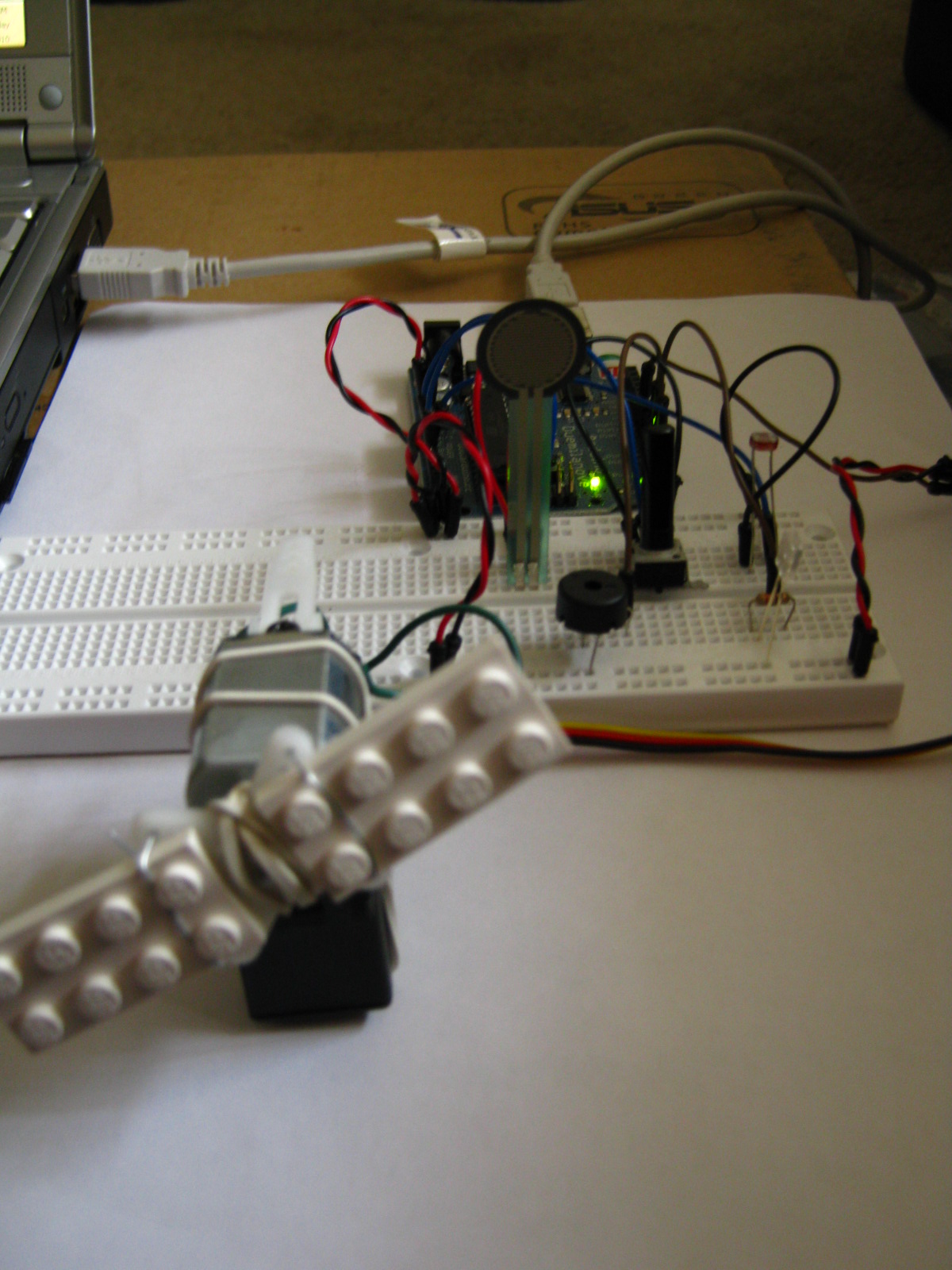
Simulation:
Here's a test simulation I worked on. The servo and the DC motor are connected together. The DC-motor has a couple of lego blocks attached to it as wings. The rest of the things, sensors, LED and buzzer are attached on the breadboard. Also, since we didn't have any direction sensing motion detectors, I have used a potentiometer to tell the servo which direction to move, assuming the moment the servo is first activated, is when motion is first detected. Moreover, the DC-motor already fried my earlier Arduino board because I forgot to attach it through a transistor - so, for now I have just left it off of the Arduino and connected it to an external power without any connection to the Arduino at all, ..just to be on the safe side! :\
p.s. the lego fan *did* really fly away at the end of that clip! :\